Construcción
de la tarjeta de
control Construcción
de la tarjeta de
control
Consideraciones de operación
|
 |
SE comentan y
deciden aquí algunos aspectos concretos sobre la
realización física del sistema
|
|
El sistema de control de la tarjeta fue diseñado para
controlar 1 motor, con su encoder.
Las variables a controlar son la
velocidad, aceleración y posición, por medio de
los dispositivos MPID y el puente H.
El control en la variable de la
velocidad, consiste en mantener fija una velocidad sin que importe si
se tiene o no una presencia de carga en el motor, hasta que este sea
frenado.
El control de la aceleración
con la que el motor logra su movimiento, y permite llegar a determinada
velocidad se puede variar a voluntad, siempre y cuando no sea mayor que
la velocidad deseada.
En el control de posición el
motor parte de un estado de reposo en cierta posición,
llegando a una determinada posición deseada, y terminando en
reposo.
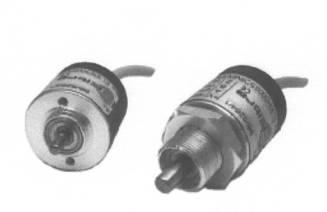
El sistema censa la velocidad a
través de un en codificador incremental, formado por un
disco ranurado colocado en el eje del motor, donde un dispositivo opto
electrónico (emisor-receptor) permite cuadrar la
señal cuando el disco gira, mandando cuatro diferentes
estados, que permiten saber en que dirección gira el motor.
|
|
|
|
|
| En
la siguiente figura se pueden observar
algún dispositivo de los llamados Encoder incremental. |
|
 |
|
|
|
|
 |
|
Construcción
de la tarjeta de
control
Elementos fundamentales del sistema
|
|
Aunque se detallan
en otros apartados, se mencionan aquí los elementos
fundamentales.
|
|
Microprocesador (8051)
LM629
74LS00
H11L1
CD40106C
2-IR2110
IRFP250N
D1N4118
BTA49
LM324
LM311
MGDI-18 : 18W POWER y MGDI-19
: 20W POWER
2- OP07
AD356A
ADC0808
TO220 (178-805)
TÉRMICO
LM7446A
MM74HC11
MM74HC08
DS26LS31 y 32
TL7705A
STDGC 16Mhz
74LS04
SN74HC4040
Conectores de 14 y 10 Pines
Componentes pasivos,
RESISTENCIAS, CONDENSADORES Y DIODOS
|
|
|
|
|
|
|
|
|
|
Construcción
de la tarjeta de
control
Diseño de la tarjeta
|
|
|
El diagrama del circuito se
realizó con el paquete de ORCAD versión 9.0, como
se observa en el apartado de esquemas, se contaban ya con algunas
librerías y otras se han confeccionado.
El diseño de las caras o lados de
componentes y soldaduras, así como el "silkscreen"
(colocación de componentes) se confecciono con el mismo
programa ORCAD en el apartado de LAYOT, este también se
pueden ver en apartado de esquemas.
|
|
|
|
|
|
|
Construcción
de la tarjeta de
control
Diseño del circuito de control
|
|
El control de velocidad consiste en
mantener fija una velocidad, aunque se tenga la ausencia o presencia de
carga en el motor.
Inicialmente el motor está en
reposo, se debe acelerar hasta llegar a la velocidad deseada, y
mantenerla sin importar las variaciones en la carga, hasta que llegue
un frenado.
La aceleración con la que el
motor alcanza su movimiento, se puede variar a voluntad, siempre y
cuando no sea mayor que la velocidad deseada.
El control de velocidad es en ambos
sentidos de giro
El control de posición, parte
de un estado de reposo en cierta posición, y va a otra
posición determinada, terminando en reposo.
Para lo anterior se presenta una
aceleración, una velocidad constante por cierto tiempo, y
una desaceleración para llegar exactamente en reposo a la
posición deseada.
La aceleración-velocidad-
desaceleración deseadas, deben permanecer invariables ante
las variaciones de la carga.
El control de posición es
para ambos sentidos de giro.
El sistema sensa la velocidad a
través de un encodificador incremental (encoder), que
está formado por un disco ranurado puesto sobre el eje del
motor, y dos sensores opto electrónicos (emisor y receptor),
de un circuito electrónico que permite cuadrar la
señal, la señal cuadrada que manda cada sensor al
girar el disco está desfasada (/2, dando 4 diferentes
estados que permiten saber si el motor gira en un sentido u otro.
El MPID es un dispositivo procesador de
control de movimientos dedicados, y diseñado para usarlo con
una variedad de servomotores a escobillas de C.D., y otros
servomecanismos, los cuales proveen una señal cuadrada de
retroalimentación de posición incremental.
El MPID, se encarga de comparar el valor
medido con el valor deseado, generando la señal de error que
pasa por el filtro PID, en función del error que genera una
señal PWM.
El puente H, recibe la señal
PWM a través de los opto acopladores y del draiver y
actúa sobre el motor, proporcionando la
polarización, voltaje y corrientes requeridos para lograr el
control deseado sobre el motor. |
|
|
|
|
|
|
|
Construcción
de la tarjeta de
control
Software del sistema
|
|
Una parte
importante es contar con un software que permita la
comunicación del microcontrolador (µC) con el
dispositivo programable (MPID). A continuación se describen
las necesidades y los condicionantes de este software.
|
|
|
|
Construcción
de la tarjeta de
control
Conexión del LM629
|
|
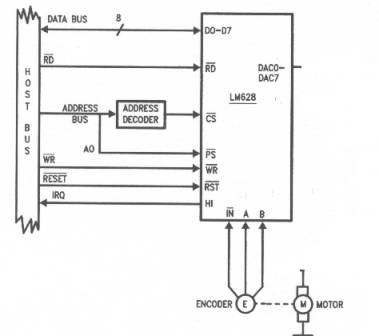
En la Figura 2.7,
se muestra la conexión del LM629 con el Bus y el Encoder, el
Bus se requieren 8 líneas de datos, lectura y escritura,
solicitud de interrupción, descodificación de
direcciones y con el Encoder señales de cuadratura A y B e
índice IN.
|
|
| Figura
2.7 Conexión del LM629 con
el µC |
|
|
|
|
|
|
|
Módulos
de
programación para el control
Módulo de chequeo del Bit-busy
|
|
Se describen en
detalle los diferentes módulos del programa típico
|
|
|
|
|
Es el primer módulo requerido.
Comprueba el Bit-busy, que forma parte
de la palabra de estado del MPID e indica cuando es posible la
transferencia de datos.
La ejecución se repite hasta
que el bit indica que el MPID no está ocupado.
Se ejecuta cuando el procesador escribe
un byte comando, o lee o escribe el segundo byte de datos, ver tabla
3.1.
Cuando el Bit-busy está
"ocupado" el MPID ignora cualquier comandos o intento de transferencia
de datos.
El módulo verifica el Byte de
estado, y espera hasta que el Bit-busy esté cero, lo que
garantiza la comunicación. Distribución en tabla
3.2.
En la figura 2.8, se observa el diagrama
de flujo que representa el módulo de chequeo del bit del
Bit-busy.
Este módulo se
empleará a lo largo de toda la programación.
La lectura del Byte de estado se ejecuta
enviando al MPID un comando RDSTAT, que es directamente soportado por
el hardware del MPID llevando a nivel lógico bajo /CS, /PS y
/RD. |
|
Módulos de
programación para el control
Módulo de iniciación
|
|
Inicialización
del sistema
|
|
|
|
|
Un módulo de iniciación contiene:
Un comando de puesta a cero, otro de
iniciación, un control de interrupción, y
comandos de transferencia de datos.
Puede llevar el bloque de inicio para
hardware y un comando PORT12.
Al entrar la alimentación se
lleva a cabo la puesta a cero hardware que consiste en llevar la
conexión /RST a un nivel lógico bajo.
El reset necesita al menos 1.5 ms de
aplicación.
El MPID ignora cualquier comando o
transferencia de datos durante la ejecución del reset.
En la figura 3.2, se muestra un Bloque
de inicio de hardware, que incluye una prueba funcional del MPID, esta
prueba puede ser completada inmediatamente después del
inicio de hardware. |
|
Módulos de
programación para el control
Iniciación de interrupciones
|
|
Gestión
de interrupciones
|
|
El comando RSTI, permite al usuario
poner a cero los bits de la interrupción en la palabra del
byte de estado, como se puede ver en la tabla 3-1.
El comando RSTI también pone
a cero el terminal de salida de interrupciones /HI.
Cualquier combinación de bits
será puesta a cero en una sola secuencia del comando.
El reset se puede enviar
también por software ejecutando los mismos trabajos y
atendiendo a los mismos requerimientos de ejecución de 1.5
ms máximo. |
|
Módulos de
programación para el control
Módulo de programación del filtro
|
|
Parámetros
de carga del filtro (Coeficientes)
|
|
|
|
|
| Tabla
3-3 Palabra de control del filtro |
|
Una secuencia de carga de filtro incluye:
un comando LFIL, una palabra de control
y un número variable de palabras de datos.
El comando LFIL carga los coeficientes
del filtro sobre buffers primarios antes de enviarlos al filtro para su
actualización.
Los dos bytes de datos se escriben tras
el comando LFIL, en coherencia con la palabra de control.
El primer byte del de la palabra de
control da el coeficiente de la muestra derivativa ds
(selección del intervalo de la muestra derivativa), y el
segundo byte indica, con lógica de unos en las respectivas
posiciones cuales son los coeficientes del filtro que se van a enviar,
ver los parámetros en la tablas 3-3 y 3-4, para cualquier
combinación.
Detrás de la palabra de
control se escriben los coeficientes del filtro.
Cada coeficiente forma un par de bytes
de datos en una palabra, así cualquier
combinación de los cuatro coeficientes puede ser cargada
dentro de una sola secuencia del comando LFIL.
El número de palabras de
datos de coeficientes puede oscilar entre cero y cuatro. |
|
| 15 |
14 |
13 |
12 |
11 |
10 |
09 |
08 |
ds |
Td |
| 0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
1 |
Ts |
| 0 |
0 |
0 |
0 |
0 |
0 |
0 |
1 |
2 |
2Ts |
| 0 |
0 |
0 |
0 |
0 |
0 |
1 |
0 |
3 |
3Ts |
| 0 |
0 |
0 |
0 |
0 |
0 |
1 |
1 |
4 |
4Ts |
| ... |
... |
... |
... |
... |
... |
... |
... |
... |
... |
| 1 |
1 |
1 |
1 |
1 |
1 |
0 |
0 |
253 |
253Ts |
| 1 |
1 |
1 |
1 |
1 |
1 |
0 |
1 |
254 |
254Ts |
| 1 |
1 |
1 |
1 |
1 |
1 |
1 |
0 |
255 |
255Ts |
| 1 |
1 |
1 |
1 |
1 |
1 |
1 |
1 |
256 |
256Ts |
|
|
Tabla 3-4 Selección de
código
del término derivativo en un intervalo de una muestra.
Donde: |
|
|
(21)


|
|
Módulos de
programación para el control
Carga de parámetros de la trayectoria
|
|
Programación
del módulo de trayectoria
|
|
|
|
|
| Tabla
3-5 Distribución de bits
de la trayectoria |
|
Una secuencia de carga de trayectoria
incluye: el comando LTRJ, una palabra de control de trayectoria y una
variable con un número de palabras de datos.
El comando LTRJ carga los
parámetros sobre buffers primarios.
Los dos bytes de datos se escriben
inmediatamente después del LRTJ e incluyen:
La palabra de control de trayectoria, el
primer byte del programa con lógica uno en las respectivas
posiciones del bit, el modo de la trayectoria (velocidad o
posición), el modo de la dirección de la
velocidad, y el modo de paro (ver módulo de paro).
El segundo byte indica, con
lógica de unos, las respectivas posiciones de cada bit.
También indica si los parámetros son absolutos o
relativos, vea la tabla 3-5, cualquier combinación de los
tres parámetros puede ser cargada en una sola secuencia del
comando LTRJ.
Detrás de la palabra de
control de la trayectoria va el parámetro de la trayectoria.
Cada parámetro ocupa un par
de palabras de datos (para bytes de datos).
Para cualquier combinación,
los tres parámetros se pueden cargar en una sola secuencia
del comando LTRJ. |
|
Carga
de parámetros de la
trayectoria
|
|
El primer byte de la palabra de control
de la trayectoria selecciona el modo de paro del motor, el bit 9 de la
palabra de control de la trayectoria indica paro abrupto: este modo
cambia el movimiento (a máxima desaceleración)
para pasar la posición a una posición inicial.
Si se desea un modo de paro uniforme, se
selecciona el bit 10 de la palabra de control de la trayectoria: este
modo cambia el movimiento por medio de una desaceleración
uniforme en coherencia con el rango de la aceleración.
Tras la detención por un
módulo de paro el motor maneja una señal
remanente de cero y el sistema de control puede no afectar la
posición del eje, que puede estacionado en giro libre.
Esto indica una amplificación
del offset: el eje puede rotar lentamente pero con una capacidad de
torque mínimo, a menos que se carguen parámetros
para una nueva trayectoria. |
|
Módulos de
programación para el control
Módulo de paro
|
|
Proceso de parada
|
|
Representa la forma de pasar del
movimiento al paro cuando se trabaja en modo velocidad, porque cuando
el MPID opera en el modo de posición normalmente el paro es
siempre uniforme y ocurre automáticamente al final de una
trayectoria especificada (aquí el módulo de paro
no es necesario).
Pero en situaciones especiales puede ser
preciso, como en un paro prematuro, o anticipado.
Cuando el MPID opera en modo velocidad,
el paro se realiza siempre por medio de un módulo de paro. |
|
Módulos de
programación para el control
Programa de fase de lazo
|
|
Polaridad de la
señal de control del motor
|
|
Al arrancar es preciso determinar la polaridad de la señal
de control del motor.
Si es incorrecta (o sea que hay una
inversión en el lazo), se puede presionar al eje a una
posición indeseada, resultando que la velocidad del motor se
descontrole, condición de giro uniforme a alta velocidad.
La inversión del lazo para el
MPID (LM628), puede ser corregida de tres formas:
Intercambiando la posición
del eje por medio de intercambiar la señal del encoder
(canal A y canal B), intercambiando el control de la potencia del
motor, o invirtiendo la señal del comando del motor
después de la aplicación del manejo de
amplificación del motor.
La inversión del lazo para el
MPID (LM629) puede ser corregida de tres formas:
intercambiando la posición
del eje por medio de intercambiar la señal del encoder
(canal A y canal B), intercambiando el control de la potencia del
motor, o invirtiendo la señal del PWM SIGN.
|
|
|
|
|