|
|
|
|
Microcontrolador
|
|

 |
Capítulo
I
Justificación y detalles.
A estas
alturas no
es necesario
hacer la presentación de éste tipo de
componentes, que llevan ya muchos años, desde la
década de los ochenta, introducidos en el mundo
electrónico y en la vida cotidiana.
No vamos pues a entrar en su utilidad, sino que nos
ceñiremos a nuestra aplicación y su actividad en
ella.
|
 |
| |
Las necesidades de control de
nuestro sistema son las siguientes:
* Un puerto paralelo de ocho bits,
de comunicación con el MPID.
* Señales de control para el MPID, en concreto:
* Selección del periférico, "Chip select", CS.
* Señal de aviso de lectura, RD.
* Señal de aviso de escritura, WR.
* Selección de uso del puerto de comunicaciones para datos o
instrucciones del MPID, PS.
* Reloj que se enviará al MPID, CLKp.
* Línea de recepción de interrupciones generadas
por el MPID.
* Línea de RESET "hardware" del MPID.
* Línea de recepción de interrupciones generadas
por el puente H.
* Líneas de información de datos aportados por el
puente H.
Las capacidades que precisaremos del µC van a ser:
* Velocidad, reloj, superior a 8 Mhz, dado que ésta va a ser
la velocidad del MPID.
* Dos puertos paralelo de 8 bits mínimo, uno para la
comunicación con el PID y el otro para señales de
control.
* Memorias RAM y ROM. No se considera necesario ampliar la memoria.
* Puerto serie para comunicación con el exterior del sistema.
* Memoria EPROM para su uso en la comunicación con el
exterior del sistema.
Son muchos los microcontroladores que actualmente cumplen estos
requisitos mínimos y diversas las casas que los fabrican.
Existen, además de los microcontroladores
clásicos, los DSP (Digital Signal Proccessing), cuya
arquitectura interna difiere del µC con objeto de agilizar la
comunicación, para el trabajo en tiempo real, pero en
nuestro caso esta actividad la llevará a cabo el MPID, por
tanto el µC es adecuado y suficiente.
Fabricantes de referencia en este campo son "Motorola" e "Intel". Se ha
buscado información de ambas casas, teniendo ofertas
similares. En concreto, y aunque se ha optado por la familia 8051 de
"Intel", se estudió la familia 68HC11 de "Motorola", que
aporta en su modelo MC68HC11F1 un convertidor analógico
digital (ADC) interno de 8 bits que pudiera resultar útil en
el manejo de datos analógicos procedentes del puente H.
Pero esto se va a resolver en forma diferente, y por otro lado en la
comparativa de velocidades del reloj, la oferta de la familia 8051 es
más ventajosa.
No podemos obviar tampoco que la información disponible de
la familia 8051 ha sido mayor, siendo muy utilizados y muy estudiados.
Por tanto hemos optado por un sistema ya conocido y ampliamente
experimentado.
La elección del modelo, con arreglo a las necesidades dio
como resultado el uso del 87C51RC, encapsulado DIP, con 40 contactos.
Sin embargo, y como era de esperar, al recabar información
en la página "web" de Intel, encontramos la
última actualización de la familia, los 8XC251XX,
que prometen compatibilidad "hardware" y "software" con la primitiva
MCS51, mejorando aspectos externos e internos. El encapsulado es de 44
pines, PLCC, puesto que no es preciso mantener compatibilidad. Aunque
no es objeto del trabajo, en paralelo con la descripción del
nuevo modelo seleccionado incluimos datos del antiguo en plan
comparativo.
El modelo seleccionado, equivalente al 87C51RS va a ser el 87C251SB de
la misma casa Intel. Entre corchetes [x], se incluyen las diferencias,
cuando las hay, con el antiguo modelo.
Sus características generales son:
* 1 K Byte de memoria RAM. [512 bytes]
* 16 K ROM / OTPROM / EPROM. [32K]
* Reloj (CLK) de 16 Mhz. [12 Mhz]
* 4 puertos paralelo bidireccionales de 8 bits.
* 3 contadores de 16 bits con:
1 contador arriba / abajo
Salida de reloj
* Puerto serie programable "Full Duplex"
* Set de instrucciones ampliado
* 3 contadores de 16 bits
* Estructura de Interrupciones
Siete fuentes de interrupción
Cuatro niveles de prioridad
* Vigilante Watchdog hardware
* Reducción de consumo tipos "idle" y "power down".
* Más detalles en las características del
fabricante.
|
|
| |
|
|
|
µC 87C251SB.
DESCRIPCIÓN DE PATILLAS
|
|
|
"Pin
out"detallado del Microcontrolador 87C251SB
|
|
|
| PIN
|
SIGNO
|
DESCRIPCIÓN |
ALTERNATIVA |
| 01 |
VSS1 |
ALIMENTACIÓN |
|
| 02 |
P1.0 |
PUERTO 1.0 |
T2 |
|
| 03 |
P1.1 |
PUERTO 1.1 |
T2EX |
|
| 04 |
P1.2 |
PUERTO
1.2 |
ECI |
|
| 05 |
P1.3 |
PUERTO
1.3 |
CEXO |
|
| 06 |
P1.4 |
PUERTO 1.4 |
CEX1 |
|
| 07 |
P1.5 |
PUERTO 1.5 |
CEX2 |
|
| 08 |
P1.6 |
PUERTO
1.6 |
CEX3 |
WAIT
# |
|
| 09 |
P1.7 |
PUERTO 1.7 |
CEX4 |
A17 |
WCLK |
|
| 10 |
RST |
RESET |
|
| 11 |
P3.0 |
PUERTO
3.0. |
RECEPCIÓN
SERIE |
RXD |
| 12 |
VCC2 |
ALIMENTACIÓN |
|
| 13 |
P3.1 |
PUERTO 3.1 |
TRANSMISIÓN
SERIE |
TXD |
| 14 |
P3.2 |
PUERTO 3.2 |
INTERRUPCION
0 |
/INT0 |
| 15 |
P3.3 |
PUERTO 3.3 |
INTERRUPCION
1 |
/INT1 |
| 16 |
P3.4 |
PUERTO 3.4 |
TIMER 0 |
T0 |
| 17 |
P3.5 |
PUERTO
3.5 |
TIMER 1 |
T1 |
| 18 |
P3.6 |
PUERTO
3.6 |
ESCRITURA |
/WR |
| 19 |
P3.7 |
PUERTO
3.7 |
LECTURA |
A16 |
/RD |
| 20 |
XTAL2 |
CRISTAL
DE RELOJ EXTERNO. ENTRADA |
|
| 21 |
XTAL1 |
CRISTAL
DE RELOJ EXTERNO. COMÚN |
|
| 22 |
VSS |
COMÚN
ALIMENTACIÓN |
|
| 23 |
VSS2 |
|
|
| 24 |
P2.0 |
PUERTO 2.0 |
DIRECCIÓN
ALTA 8 |
A8 |
| 25 |
P2.1 |
PUERTO 2.1 |
DIRECCIÓN
ALTA 9 |
A9 |
| 26 |
P2.2 |
PUERTO 2.2 |
DIRECCIÓN
ALTA 10 |
A10 |
| 27 |
P2.3 |
PUERTO 2.3 |
DIRECCIÓN
ALTA 11 |
A11 |
| 28 |
P2.4 |
PUERTO 2.4 |
DIRECCIÓN
ALTA 12 |
A12 |
| 29 |
P2.5 |
PUERTO 2.5 |
DIRECCIÓN
ALTA 13 |
A13 |
| 30 |
P2.6 |
PUERTO
2.6 |
DIRECCIÓN
ALTA 14 |
A14 |
| 31 |
P2.7 |
PUERTO 2.7 |
DIRECCIÓN
ALTA 15 |
A15 |
| 32 |
/PSEN |
STROBE
MEMORIA EXTERNA |
|
| 33 |
ALE |
HABILITA
LATCH DIRECCIONES / ENTRADA PROGRAMACIÓN EPROM |
/PROG |
| 34 |
VSS2 |
|
|
| 35 |
/EA |
HABILITA
ACCESO EXTERNO / ALIMENTACIÓN PROGRAMACIÓN EPROM |
VPP |
| 36 |
P0.7 |
PUERTO 0.7 |
DIRECCIÓN
BAJA 7 |
AD7 |
| 37 |
P0.6 |
PUERTO 0.6 |
DIRECCIÓN
BAJA 6 |
AD6 |
| 38 |
P0.5 |
PUERTO 0.5 |
DIRECCION
BAJA 5 |
AD5 |
| 39 |
P0.4 |
PUERTO
0.4 |
DIRECCIÓN
BAJA 4 |
AD4 |
| 40 |
P0.3 |
PUERTO 0.3 |
DIRECCION
BAJA 3 |
AD3 |
| 41 |
P0.2 |
PUERTO
0.2 |
DIRECCION
BAJA 2 |
AD2 |
| 42 |
P0.1 |
PUERTO 0.1 |
DIRECCION
BAJA 1 |
AD1 |
| 43 |
P0.0 |
PUERTO 0.0 |
DIRECCION
BAJA 0 |
AD0 |
| 44 |
VCC |
ALIMENTACIÓN
POSITIVA |
|
|
|
|
µC 87C251SB.
DESCRIPCIÓN DE PATILLAS |
|
|

|
|
|
|
| |
|
|
|
Capítulo
II
Puente H.
Descripción
de la
arquitectura
del dispositivo puente H
.
|
|
|
En la figura 2.6
se muestra la arquitectura equivalente mediante cuatro interruptores
del diseño conocido como puente " H ".
Este puente recibe una alimentación de DC y permite un
control bidireccional de la corriente que circula por el motor.
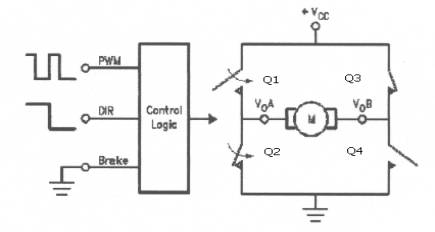
Figura
2.6 Puente H
|
|
| |
|
|
|
Capítulo
III
Etapa de potencia.
Justificación.
|
|
| |
Los requerimientos de potencia de
nuestro trabajo están por
encima de las soluciones completamente integradas para el control de
motores de corriente continua, al superarse los 10 W que soporta esta
solución.
En consecuencia, la etapa de potencia
ha de ser construida con
componentes activos y discretos y dimensionados éstos para
atender los requerimientos previstos.
La topología no ofrece alternativa, una vez decidido el
controlador que la va a dirigir, el LM629, con salida PWM, por lo que
se diseñará un puente en H.
Igualmente sucede con los elementos de conmutación, que
entran en la gama de posibilidades de los MOSFET, no existiendo
necesidad de una potencia mayor que requiriera IGBT o conmutadores
controlados de mayor potencia.
El control del puente, proveniente del controlador, va a llevar el
disparo de los MOSFET mediante "drivers" integrados del tipo IR2110, de
"International Rectifiers", específico para este tipo de
aplicaciones, que soporta entrada PWM y salidas complementarias
referenciada a masa una y flotante la otra, para solventar los
problemas inherentes al referenciado del disparo en las
líneas de puerta no referenciadas a la masa de potencia, Q3
y Q1. También aporta una desactivación del puente
por exceso de corriente que proviene del "sensado" de la corriente de
la línea de potencia.
El proceso de selección de componentes del puente y su
dimensionado se detalla posteriormente.
A continuación se resume el funcionamiento básico
de esta topología.
Convertidor "Full-Bridge", puente completo (H).
Partiendo de una alimentación continua (potencia) aplicada
sobre Q1 (+) y Q2 (-) y aplicando señales de disparo a los
MOS FET, se pueden dar las siguientes situaciones:
1 Conducción de Q1 y Q4:
La carga inductiva se ve sometida a una tensión de magnitud
igual a la de la fuente, invertida en signo. Por ella circula una
corriente de sentido negativo respecto de la referencia.
2 Conducción de Q1 y Q3 o Q2 y Q4:
La carga resulta cortocircuitada, con tensión cero y sin
circulación de corriente.
4 Conducción de Q3 y Q4 o Q1 y Q2:
Estas situaciones resultan prohibidas, porque tienen como consecuencia
cortocircuitar la potencia.
Cuando aplicamos un control de puerta a los MOSFET en forma que
ésta sea la misma para Q2 y Q3 e igual pero complementaria
para Q1 y Q4, el circuito alternará el signo de
tensión y corriente siguiendo el ciclo de disparo (ciclo de
trabajo) sobre la carga. Al tratarse de una carga inductiva, y si el
ciclo de trabajo fue calculado para permitir la carga y descarga del
bobinado, a través de la carga circula una corriente media
que excitará el motor de forma proporcional al tiempo en que
resulten disparadas las líneas de MOSFET.
Con las combinaciones descritas anteriormente, fácilmente se
ve que, actuando sobre el disparo, podemos regular el nivel de la
corriente media de excitación del motor (velocidad) y su
sentido (sentido de giro). Igualmente se puede para el motor,
impidiendo que circule corriente por su bobinado. Este es el tipo de
control que precisa nuestra aplicación.
Concretando, al disponer de un control de disparo en forma de magnitud
y signo, lo que éste pretende es regular la velocidad
mediante el ancho del pulso considerado respecto de una frecuencia fija
(ciclo de trabajo) y su sentido de giro con la señal de
signo.
Consideraciones.
Se fijará una magnitud máxima de la
alimentación (potencia), que será la
máxima potencia del motor que podamos situar como carga.
Esta potencia máxima viene limitada por las prestaciones del
tipo de MOSFET seleccionado. Se determinarán las dimensiones
de diodos rápidos (Schotky) entre drenador y fuente de los
MOS FET, en función de los picos de tensión por
carga inductiva esperados.
Se fijará un ciclo de trabajo que también
tendrá un máximo, del orden de kilo hercios,
determinado por la capacidad de los MOSFET. Esta frecuencia
limitará también el tipo de carga que se pueda
situar, porque debe ser coherente con las características
inductivas del motor, en el sentido de que sus bobinados sean capaces
de seguir el ciclo de carga y descarga requerido. El ciclo de trabajo
se fijará mediante el reloj del controlador LM629. Esta
señal de control se conducirá al driver IR2110 a
través de opto acopladores, para evitar interferencias entre
el circuito lógico y el de potencia, aislándolos
entre sí.
Se fijarán unos "tiempos muertos" en los cuales no exista
excitación de puerta ninguna, durante las transiciones, para
dar tiempo a los MOSFET a alcanzar el estado requerido de
conducción o bloqueo, ya que su capacidad de entrada en
puerta retrasa su respuesta.
De lo contrario se producirán combinaciones indeseadas. Se
determinarán por las características de los
MOSFET y se fijarán en la entrada de los "drivers" IR2110
mediante una red R-C. Al tratarse de nano segundos, estos tiempos no
resultan significativos con respecto de la frecuencia de trabajo.
Se determinará el tipo y dimensionado de los disipadores de
los MOS FET para garantizar la potencia máxima fijada,
calculados sobre la impedancia térmica que suponga la
conmutación. La realimentación del sistema
tomará muestras de un "encoder" fijado sobre el rotor del
motor, conducida al controlador LM629 mediante "line drivers" de
línea diferencial.
Se tomará muestra del consumo de corriente del puente,
mediante sensado sobre la línea de retorno de potencia, para
controlar su magnitud máxima y media que será
tratada y digitalizada por un interfase diseñado al efecto,
para su lectura por el µC, con objeto de que éste
determine los límites de funcionamiento esperado y active
una protección si se ven superados.
Se establecerá un control de exceso de temperatura que se
tomará sobre el disipador de los MOSFET y
activará una interrupción del µC. Se
diseñará el interfase que conduzca esta
señal de interrupción.
Los requerimientos de potencia de
nuestro trabajo están por
encima de las soluciones completamente integradas para el control de
motores de corriente continua, al superarse los 10 W que soporta esta
solución.
|
|
|
|
|
|
|
|
|
Capítulo IV
Formas de señales del PWM
El
puente H, realiza la
interfaz fácilmente con diferentes formas de
señal PWM.
A
continuación se describen las dos formas más
populares de
PWM.
|
|
| |
1. Simple
señal de fase del PWM. Esta consiste de una simple
señal de una variable de ciclo obligado en la cual son en
codificadas ambas la dirección y la información
de la amplitud como se ve en la figura 2.6a.
Donde una señal PWM con un ciclo obligado del 50% representa
el manejo del cero, ya que el valor de la red de voltaje (integrada
sobre un período) entregado a la carga es cero.
|
|
|
|
Figuras
2.6a y 2.6b
|
| 2. Signo y
magnitud de PWM, consiste de una dirección separada y una
señal de amplitud ver figura 2.6b. La señal de
magnitud es modulada de ciclo obligado, y la ausencia de una
señal de pulso (una lógica continua de nivel
bajo), representa un manejo de cero. La corriente entregada a la carga
es proporcional al ancho de pulso. |
|
|
|
|
|
|
|
|
Capítulo
V
Limitación de corriente
El circuito de
protección para la limitación de corriente
será incorporado dentro del diseño del puente H.
|
|
Pero como
cualquier dispositivo de potencia, es importante que se considere el
efecto de la corriente que surge sustancialmente a través
del dispositivo. El sensado de corriente se tomara a través
de una resistencia de 0.1ohmio, este estará formado por un
"AO" del tipo LM 324 y este conectara a un comparador del tipo LM 311.
|
|
|
|
|
|