Descripción del sistema de control de
velocidad
 Capítulo
I Capítulo
I
Control P.I.D.
|

|
Elemento
programable MPID
Realmente
el sistema está definido por el procesador
anfitrión que manda todos los comandos al microcontrolador PID
programable LM629 (MPID), en donde llega
primeramente el valor de la señal inicial, cuando el motor
inicia su movimiento y posteriormente retroalimenta el valor de la
señal del encoder.
Esta es decodificada dentro del MPID
realizándose la suma de estos valores, se genera una
diferencia de error que actúa directamente en el filtro PID
quien se encarga de corregir los valores que llegan al dispositivo de
puente H.
|
| Los
MPIDs, son
dispositivos dedicados al control de
motores de DC y servomecanismos, que ocupan
señales de retroalimentación de cuadratura
incremental.
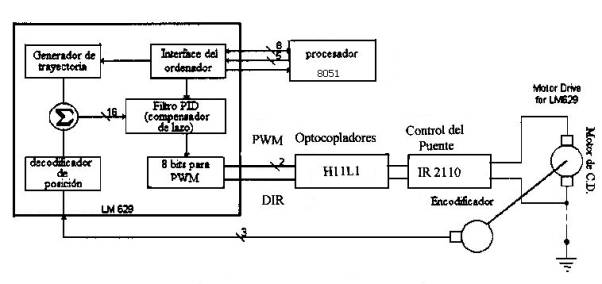
En la figura 2.1 y 2.2
se muestra el sistema de control de los motores mediante los
dispositivos LM628 y el LM629
respectivamente.
|
 |
| Ambos
el LM628 y el LM629 tienen un
bus periférico, y pueden ser programados por una computadora
(procesador).
Esta
aplicación no es recomendable por presentar un punto de
iniciación concreto para la programación de estos
controladores de movimiento de precisión.
Si el enfoque es
sobre el desarrollo de programas cortos, donde esta prueba es
funcionalmente en sistemas Globales, y ponen el fundamento para
más programas complejos.
Este representa
también un método para armonizar el filtro PID de
compensación de lazo.
En la figura 2.1 y 2.2 se ve que el sistema de
control lo realiza en interfaz directa con un procesador dentro del
mismo LM628 o LM629 donde se tienen 6 líneas de control y 8
líneas a un puerto de E/S que se conecta a una computadora,
en nuestro diseño los datos pasan directos de la
computadora.
Durante los inicios de hardware y software cuando se utiliza un DAC a
la salida por defecto se utiliza el modo de 8 bits.
Si un LM628
utiliza un DAC de 12 bits en el lazo de control, el
comando PORT12 puede ser emitido inmediatamente
seguido del bloque de inicio del hardware, accionándose
todos los reset subsecuentes. La falla para que el comando PORT12
sea emitido, es el comportamiento errático e impredecible
del motor.
Si el lazo de control utiliza un DAC de 8 bits, el
comando de 8 bit no debe ser ejecutado, esto depende del resultado
errático e impredecible del motor.
Un LM629 ignorará el comando PORT8
(ya que da una salida PWM en signo / magnitud de 8 bits). Y el comando PORT12
puede ser no emitido en el sistema basado en el LM629.
De hecho el LM628 y el LM629 funcionan igual excepto en el modo de
utilizar la salida de puerto en el comando PORT12.
|
|

|
|
|
|
|
Capítulo
II
Filtro P.I.D.
Filtro digital
P.I.D.
Filtro P.I.D.
El MPID, usa un filtro digital PID
(proporcional, integral y derivativo) para compensar el lazo de control.
El motor se sostiene en la posición deseada al aplicar una
fuerza restauradora para el motor que es proporcional al error de
posición, más el error de integración,
y más el error derivativo.
La siguiente ecuación discreta en el tiempo ilustra el
control ejecutado por el MPID.
|
| (1) |
 |
Donde
u(n) es
la
señal de salida de control en el tiempo "n"
de muestreo, e(n) es el error de
posición en el tiempo "n"
de muestreo, "n" indica la
muestra de la derivada de muestreo, y Kp,
Ki, y Kd
son los parámetros cargados (ajustados por el usuario o
preajustados de fábrica).
El primer término, el proporcional, provee una fuerza
restauradora proporcional al error de posición, de la misma
forma como un resorte obedece a la ley de Hooke.
El segundo término, el de integración, provee una
fuerza restauradora que crece con el tiempo, asegurando que el error de
posición sea cero. Aunque exista una carga constante del
torque, el motor será capaz de llevarlo al error de
posición cero.
El tercer término, el derivativo, provee una fuerza
proporcional a la razón de cambio del error de
posición, este actúa de la misma forma que un
amortiguador viscoso en un sistema de resorte de masa.
El intervalo de muestreo asociado con el término derivativo
es seleccionado por el usuario, todo esto hace que el MPID sea capaz de
controlar un amplio rango de cargas inerciales (constante
mecánica de tiempo), ya que la derivada continua provee una
mejor aproximación.
En general, los intervalos de muestreo son muy útiles en
operaciones de baja velocidad.
En la operación, el algoritmo del filtro recibe una
señal de error de 16 bits desde el lazo de control del
sumador, donde la señal de error se satura en 16 bits para
asegurar un comportamiento.
En resumen, al multiplicarse por los coeficientes del filtro
Kp, la
señal de error se agrega a una acumulación de
errores previos para formar la señal integral, y en una
razón determinada al escoger el intervalo de muestreo
derivativo, el error previo se sustrae de este (para formar la
señal derivada).
Todas las operaciones de multiplicación del filtro son de 16
bits, donde únicamente se utiliza la parte baja del producto
de los 16 bits.
La señal integral se mantiene en 24 bits, pero solamente se
utiliza la parte alta de los 16 bits.
Esta es la técnica de escalar un rango útil de
los valores coeficientes de Ki.
Los 16 bits se desplazan 8 posiciones a la derecha y multiplicados por
el coeficiente Ki del filtro
para formar el término desde el cual, contribuye a la salida
del motor.
La magnitud absoluta de este producto es comparada con los coeficientes
Ki, y el
valor más pequeño en magnitud se apropia y se
asigna entonces a la señal del motor.
La señal de derivación se multiplica por el
coeficiente Kd a cada intervalo
de muestreo derivativo. Este producto contribuye a la salida del motor
en cada intervalo de muestreo, independientemente del intervalo de
muestreo derivativo escogido por el usuario.
El Kp, Ki
limitado y Kd en productos son sumados para formar una cantidad de 16
bits.
Dependiendo del modo de salida (tamaño de palabra) ya sea de
8 o de 12 bits para la salida de control del motor. |
 |
|
|
|
|
|
|
|
Capítulo
III
Descripción del MPID
|
|
Descripción
de la arquitectura del dispositivo MPID. Diagrama de bloques del
sistema MPID.
Descripción de la
arquitectura del dispositivo MPID
Diagrama de bloques del sistema MPID.
En la figura 2.3 se observa el MPID con sus terminales de
entrada-salida, el microprocesador, el puente H, el motor, y el encoder,
que forman el lazo de control PID en estudio.
|
|
Figura
2.3 Diagrama de bloques del sistema
|
Arquitectura del
Microcontrolador PID (MPID)
En esta sección se detallan cada uno de los componentes y su
uso dentro de la arquitectura del microcontrolador PID usado, ver
figura 2.4.
Se tiene una ROM de 1k x 16
bits que usa
instrucciones de 16 bits, donde el algoritmo de control es almacenado.
Se cuenta con un secuenciador PLA que decodifica esas instrucciones y
da transferencia de señales de datos cronometradas para un
bus
de datos de 16 bits.
Tiene una RAM donde son almacenados los parámetros de
trayectoria de doble palabra(32 bits). Cuenta con un registro de
posición de 32 bits de suficiente rango dinámico,
el cual también es usado para valores de velocidad y
aceleración. Y por último, hay un ALU de 32 bits
que se usa para soportar multiplicaciones de 16 x 16 bits para valores
del error y coeficiente del filtro PID.
|
|
|
Los motores de
pasos son dispositivos utilizados en una variedad de aplicaciones donde
movimientos con una pequeña cantidad de torque son
necesarios.
Aplicaciones típicas de este tipo de motores es el
movimiento de mecanismos en impresoras, posicionamiento de
láser en dispositivos ópticos, control de tablas
rotatorias entre otras.
Los motores de pasos funcionan al aplicarles secuencias de pulsos de
entrada (típicamente sobre cuatro cables de
conexión unidos a cuatro interruptores de control), en cada
pulso el motor gira un ángulo dado, por ejemplo 1.8°.
A este ángulo de giro se le denomina ángulo de
paso.
Los ángulos de paso estándar típicos
en grados son: 0.72, 1.8, 3.75, 7.5, 15 y 18.
De esta manera un motor de pasos con un ángulo de paso de
3.75° completará una revolución en
exactamente 96 pasos.
La tolerancia radial de posicionamiento típica que se maneja
para este tipo de motores es de 3%-5% para un paso; de esta manera para
el ejemplo de 3.75° la tolerancia sería, a 4%,
0.04*3.75, es decir 0.15°.
Los motores de pasos están construidos basándose
en estatores y rotores de múltiples polos.
Así, por ejemplo, un motor típico contiene un
estator de cuatro polos y un rotor de seis polos, y utiliza cuatro
interruptores de control.
Las secuencias de pulsos aplicadas a los interruptores son generadas
típicamente por un circuito integrado especializado, lo cual
permite un control mas adecuado.
|
|
|
|
|
|
|
|
|
|
Capítulo
IV
Motores Sincros y Resolvers
Sincros es un
nombre general para una serie de motores que indica posición
de movimiento rotatorio duplicado.
El resolver, en algunas ocasiones considerado como un subtipo del
synchro.
Tanto el motor Sincro como el motor resolver son dispositivos para
pequeños torques.
Los sincros son pequeños motores cilíndricos que
varían en diámetro desde 1/2'' hasta 4'',
dependiendo de su potencia de salida.
Este tipo de motor funciona convirtiendo una señal de
entrada de fase sencilla en tres voltajes no balanceados que
están 120° fuera de fase eléctricamente.
Los motores sincros están construidos a base de un estator
con tres devanados y un rotor con un devanado que es alimentado con un
voltaje a través de dos escobillas por medio de dos anillos
deslizantes (colectores).
Existen siete tipos principales de motores sincros: transmisor de
torque (TX), transmisor de control (CX), transmisor diferencial de
torque (TDX), transmisor diferencial de control (CDX), receptor de
torque (TR), receptor diferencial de torque (TDR) y transformador de
control (CT).
Una aplicación típica de estos motores es
utilizar un transmisor de torque (TX) para manejar a un receptor de
torque (TR).
Así, si el TX rota a un ángulo dado, el TR
rotará el mismo ángulo.
Otro uso es generar la suma o la sustracción de
ángulos de rotación; en este caso se colocan en
serie un TX, un transmisor diferencial de torque (TDX) y un TR.
Así, la posición de TR será el
resultado de la suma o resta del ángulo de
rotación de TX y el ángulo de rotación
de TDX.
Los resolvers son motores parecidos a los sincros, pero
varían en los siguientes aspectos:
El desplazamiento eléctrico en este caso es de 90º,
y no de 120º; tanto el estator como el rotor contienen dos
devanados; un voltaje de entrada puede ser aplicado tanto al estator
como al rotor.
Una aplicación típica de un resolver es en la
navegación o en la determinación de alturas.
|
|
|
|
|
|
|
|
Capítulo
V
Servomotores D.C. / A. C.
Los servomotores
de D.C. y A.C. son dispositivos ideales para manejar altas capacidades
de torque, control preciso de velocidad y control preciso de
posición.
De esta manera, podemos listar las principales
características de los servomotores como sigue:
Pueden producir grandes torques a altas velocidades
Son capaces de mantener una posición estática
Son capaces de mantener bajas velocidades o nulo movimiento sin
sobrecalentarse
Son capaces de invertir su dirección de movimiento
rápidamente para alcanzar una posición o una
velocidad rápidamente
Son capaces de acelerar o desacelerar rápidamente
Son capaces de retornar a una posición específica
después de un intervalo de tiempo sin generar movimientos
erráticos.
Los servomotores se construyen con cuatro, seis o más polos
y son adecuados para poder utilizar suministro de potencia
trifásica.
Tanto la velocidad rotacional como el torque en este tipo de motores,
son controladas por la diferencia de fase entre el devanado principal y
el devanado de control.
Invertir la diferencia de fase nos permite controlar retardos en el
movimiento o cambiar la dirección de rotación del
motor.
De esta manera, si llamamos Vs al voltaje de alimentación
del devanado principal y Vc al voltaje de alimentación del
devanado de control, y si ambos voltajes tienen la misma amplitud,
tenemos lo siguiente:
- Para un torque máximo las formas de onda de Vs y Vc
están desfasadas 90º
- Para velocidades menores, el desfase entre Vs y Vc es menor a los
90º
- Para un movimiento nulo las formas de onda están
perfectamente en fase. |
|
|
|
|
|
|
|
Capítulo
VI
Otros tipos de motores.
Motor de rotor de disco
Se describen
sucintamente otros tipos de motores de uso especial.
Es
también llamado motor de movimiento espiral.
Consiste en un estator con magnetos cilíndricos permanentes.
Los magnetos son alternadamente de polaridad norte y sur.
El rotor de disco es eléctricamente alimentado con corriente
a través de un conmutador.
El rotor tiene una gran cantidad de trayectorias de corriente y
funciona de manera similar que en un motor de DC o un motor universal
de AC.
El motor de rotor de disco difiere de otros en que su rotor tiene una
muy baja inercia; de esta manera, la relación del torque de
motor a la inercia es muy alta.
Por esta razón este tipo de motor es utilizado en
aplicaciones donde las aceleraciones, desaceleraciones y cambios de
sentido de rotación rápidas son esenciales. |
|
|
|
|
|
|
|
Capítulo
VII
Motor de efecto "Hall"
Es un motor de
DC eficiente, confiable y de baja potencia.
Su operación está basada en el efecto Hall.
El efecto Hall se da cuando un campo magnético y una
corriente son aplicados a un material semiconductor especial o a un
cristal.
El campo magnético y la corriente aplicada producen un
voltaje a través del material semiconductor.
Este voltaje de DC resultante es proporcional al producto del campo y
de la corriente. |
|
|
|
|
|
|
|
Capítulo
VIII
Motor de histéresis
Es esencialmente
un motor de inducción que funciona a velocidad
síncrona y tiene un rotor especial.
Su estator puede ser de cualquier tipo que produzca un campo
magnético giratorio.
Estos motores son de baja potencia y de baja eficiencia.
Los motores de histéresis son utilizados para lentos
arranques, aplicaciones síncronas, tales como los
temporizadores.
El rotor consiste de un núcleo de material no
magnético y una capa de material magnético
adherido al núcleo.
El principio de operación de este motor es el retardo de
acumulamiento del campo magnético del rotor causado por
efecto de histéresis.
El material seleccionado para la superficie del rotor debe de tener,
lógicamente, características de alta
histéresis.
Aleaciones que contienen cobalto o vanadium son materiales que cumplen
con el requisito y son generalmente utilizadas. |
|
|
|
|
|
|
|
Capítulo
IX
Motor de reluctancia
Es otro motor
que funciona a velocidad síncrona.
Su ventaja sobre un motor síncrono convencional es que
éste no contiene devanados en el rotor.
La ausencia de devanado en el rotor elimina la necesidad de colectores,
escobillas y
cualquier alimentación hacia el rotor.
Al eliminar estos elementos se reduce los costos por mantenimiento.
Sin embargo, el motor de reluctancia es un motor de torque
pequeño, bajo factor de potencia y baja eficiencia.
El rotor de este tipo de motores tiene una indentación entre
polos y contiene barras de cobre colocadas axialmente sobre los polos.
El rotor tiene diferentes reluctancias magnéticas a
diferentes ángulos del rotor.
El estator puede ser de cualquier tipo que produzca un campo
magnético giratorio. |
|
|
|

|
|
Capítulo
X
Motores lineales
Son
esencialmente solenoides de posición variable.
Están construidos principalmente a partir de bobinas y
magnetos permanentes.
Cuando una corriente fluye por las bobinas, la fuerza
magnética atrae o repele a los magnetos permanentes y se
genera el movimiento. |
|
|
|
|
|
Capítulo
XI
Motor de torque
Es un tipo
especial de motor lineal que tiene típicamente el
tamaño de un puño y son generalmente costosos.
El movimiento de estos motores es normalmente de milésimas
de pulgada.
La ventaja de estos motores es la gran linealidad que presentan entre
la señal de entrada y su mecanismo de desplazamiento.
Una aplicación típica de estos motores es en
servo válvulas hidráulicas.
El torque por el movimiento del motor es usado para variar el flujo de
una válvula hidráulica piloto.
También, el torque del rotor tiene una relativamente alta
frecuencia de respuesta y puede seguir rápidas variaciones
de la señal de entrada.
|
|
|
|
|
|
Capítulo
XII
Motor "inside-out"
En este tipo de motor la parte normalmente definida como rotor es un
elemento estacionario.
Los solenoides son bobinados alrededor del elemento estacionario y los
conectores de la potencia son colocados fuera del rotor.
La parte normalmente definida como estator, en este caso es el elemento
que rota.
El elemento que esta rotando está hecho de magnetos
permanentes y el elemento estacionario es alimentado con pulsos de D.C.
o A.C. para crear el campo magnético giratorio.
Los motores "inside-out" se encuentran en algunas máquinas
de oficina en aplicaciones especiales. |
|
|
|
|
|
| |
|
Capítulo
XIV
Algunos motores
A
continuación se puede observar una figura con algunos de los
MOTORES mencionados.

|
|
|
|
|
|
|